Swarm Robotics and Decentralized Computation
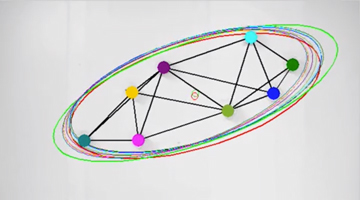
A wide range of networked systems exhibit emergent behavior. In nature, for example, flocks of birds, schools of fish, and swarms of bees all develop cohesive global behavior from purely local interactions. The goal of our research is to develop the tools necessary to design local control, communication, and estimation laws for individual agents that yield a desired group behavior.Research Topics
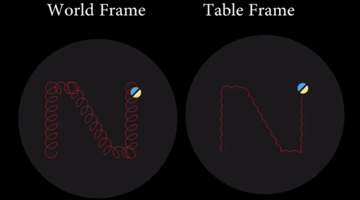

Swarm shape control

Human-swarm interaction
We develop algorithms that enable autonomy to automatically react to human sensory and perception needs to improve situational awareness.

Algorithmic matter
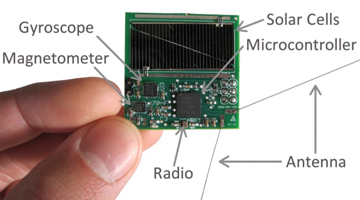
We develop computational models to enable the design of microrobots with minimal actuation, sensing, and computation.