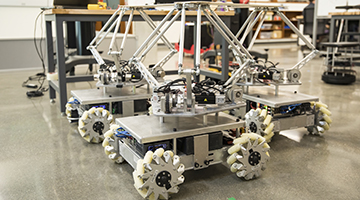
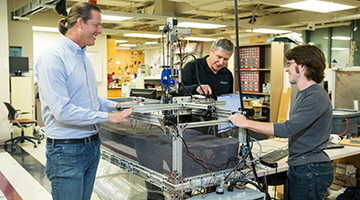
General Autonomous Robotics
Autonomous systems use sensory data, artificial intelligence, machine learning, and motion planning and control to make real-time decisions about how to act in changing environments.Research Topics

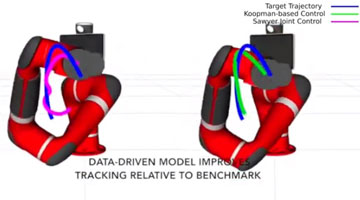

Multi-fingered manipulation
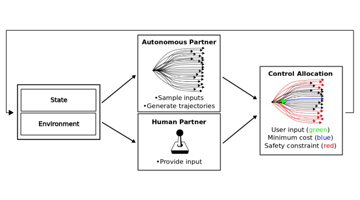
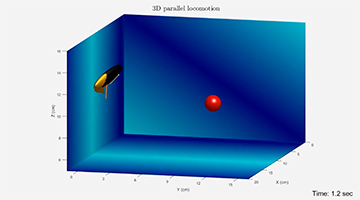
Control of cyber-physical systems in uncertain environments
We develop algorithms that help complex cyberphysical systems to anticipate future uncertainty.