
Shared Control: Blended Human-Robot Control
This project proposes a formalism for customizable shared control, that enables users to customize the way they share control with intelligent assistive devices based on their abilities and preferences. In our formalism, the system arbitrates between the user input and the autonomous policy prediction, based on the confidence it has in the policy’s prediction and in the user’s ability to perform the task.
 Our work on this project has focused on placing the customization of how control is shared directly in the hands of the end-user. An exploratory study with spinal cord injured and uninjured subjects allowed subjects to verbally customize the function which governed how control was shared.
Our work on this project has focused on placing the customization of how control is shared directly in the hands of the end-user. An exploratory study with spinal cord injured and uninjured subjects allowed subjects to verbally customize the function which governed how control was shared.
Funding Source: National Institutes of Health (NIH-R01EB019335)
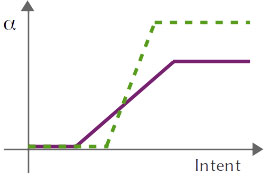
User-driven Customization of Control Sharing.
Back to top