
Shared Control: Trust-Based Control
How much should a person be allowed to interact with a controlled machine?
The aim of this project is to balance the ability of a person to direct a cyber-physical system and the system’s representation of its own capabilities and limitations. We have developed a science of trust, that bridges human operator capabilities and physical system safety.
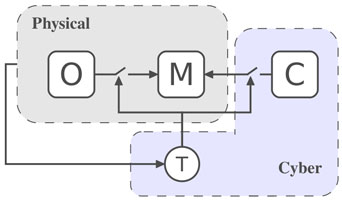 We focus specifically on the case of robot motion that is mutually controlled by a human and an autonomous system. A formal measure of trust in the operator is computed, which decides how much control to cede to the operator during physical correction or mutual control. Our work on this project also has jointly modelled the human-robot system dynamics using spectral methods that learn from data gathered during human teleoperation of the machine.
We focus specifically on the case of robot motion that is mutually controlled by a human and an autonomous system. A formal measure of trust in the operator is computed, which decides how much control to cede to the operator during physical correction or mutual control. Our work on this project also has jointly modelled the human-robot system dynamics using spectral methods that learn from data gathered during human teleoperation of the machine.
Funding Source: National Science Foundation (NSF/CPS-1329891). In collaboration with Todd Murphey, Mechanical Engineering, Northwestern University and Magnus Egerstedt, Georgia Institute of Technology.
Back to top