
Control Synthesis and Embodied Intelligence
Autonomous systems use sensory data to make decisions about how to act in their environments. Often, either a system itself or the environment it is in can make control synthesis challenging, particularly in real-time constrained settings where the environment is changing. Embodied intelligence, where the physical design of a robot implicitly or explicitly encodes part or all of a control policy, can make control synthesis easier or unnecessary. Embodied intelligence can realized by simultaneously designing the physical system and synthesizing control.
Feedback Synthesis for Controllable Underactuated Systems
Various robotic agents are underactuated either by design (to reduce actuator weight or expenses) or as a result of technical failures. Although underactuated, many of these agents remain controllable through the net effect of combined actions. Using sequential second-order single actions, we derive a feedback controller that has formal guarantees of descent for certain controllable systems.
Our synthesis method finds control solutions for a wider part of the state space and outperforms first-order single actions. In simulations, we are able to track in real-time a moving target using the dynamics of an underactuated, fish-like, 3D rigid body in the presence of fluid flow.
The synthesized control actions for the underwater fish from the derived second-order feedback controller are successful and much more accurate than the first-order controller.
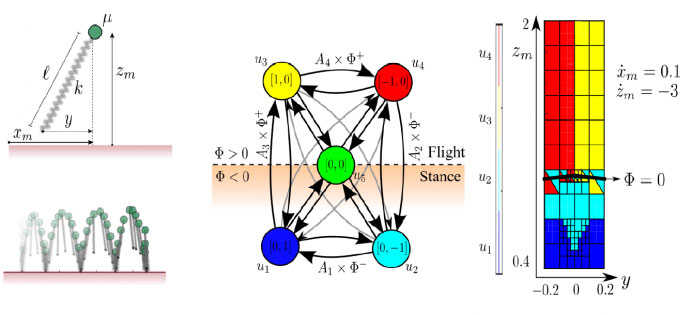
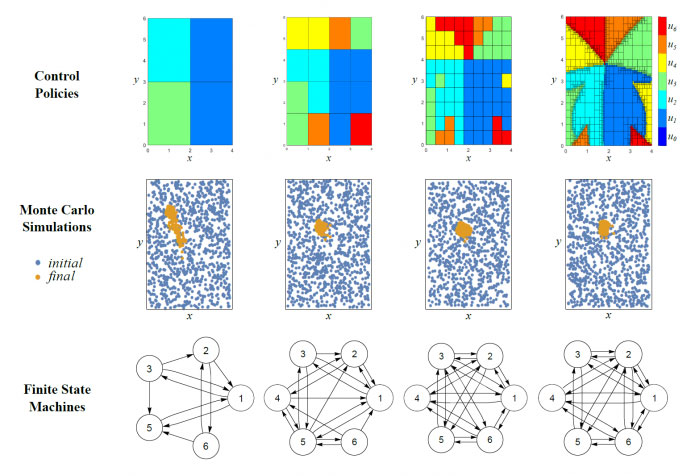
Embodied Intelligence Using Finite State Machines
In this project, both micro- and macro-scale robots are being designed to physically encode part or all of a control policy. Robots can take advantage of principles of embodied intelligence to reduce or eliminate the necessity for real-time computation, whether it be to decrease reaction time in a walking robot or to reduce memory (and therefore size) requirements for a microscopic electronic device.
Control policies are being constructed for these systems to achieve tasks (e.g. demonstrating a periodic hopping gait or locomoting toward a desired point) by mapping sensory inputs directly to control outputs – so no real-time computation is necessary. These control policies can be simplified down to their essential components, so that very little memory is required to execute them. Experiments are being conducted to see whether these robots really can achieve desired tasks autonomously.
People
Todd Murphey
Giorgos Mamakoukas
Ana Pervan
Related Publications
Local Koopman Operators for Data-Driven Control of Robotic Systems, Robotics Science and Systems, 2019
Algorithmic materials Embedding computation within material properties for autonomy, Robotic Systems and Autonomous Platforms, Woodhead Publishing, pp. 197-221, 2019
Efficient Computation of Higher-Order Variational Integrators in Robotic Simulation and Trajectory Optimization, Workshop on the Algorithmic Foundations of Robotics (WAFR), 2018
Feedback Synthesis For Underactuated Systems Using Sequential Second-Order Needle Variations, The International Journal of Robotics Research, 2018
Feedback Synthesis for Controllable Underactuated Systems using Sequential Second Order Actions, Robotics Science and Systems, 2017
Sequential Action Control for Models of Underactuated Underwater Vehicles in a Planar Ideal Fluid, American Control Conference (ACC), Boston, MA, pp. 4500-4506, 07/2016/ 2016
Automatic synthesis of control alphabet policies, IEEE International Conference on Automation Science and Engineering (CASE), pp. 313 - 320, 2016
Back to top