
Human-in-the-Loop Automation
About
We are developing human-in-the-loop interfaces for task-based assistance and training. Using these interfaces, we address issues of uncertainty from both the human and unknown dynamics of the environment while allowing users to be as autonomous as possible. This work moves away from controls that prioritize trajectory error that use a priori knowledge of the joint human-machine system in favor of data-driven approaches with applications to a broad class of tasks and sensorimotor deficits.
Controllers as Filters: Human-in-the-loop Interfaces Based on Maxwell's Demon
This research focuses on the development of control algorithms that can handle input signals with high uncertainty and noise. Using an optimal control as a point of comparison, we can intelligently filter Gaussian noise or human inputs to improve success or performance of a given task. The concept is based on Maxwell's Demon and can be used to synthesize human-in-the-loop interfaces that enhance task learning.
Watch the NSF "Science Nation" feature video of this work
Optimal Tactile Feedback to Enhance Learning and Rehabilitation
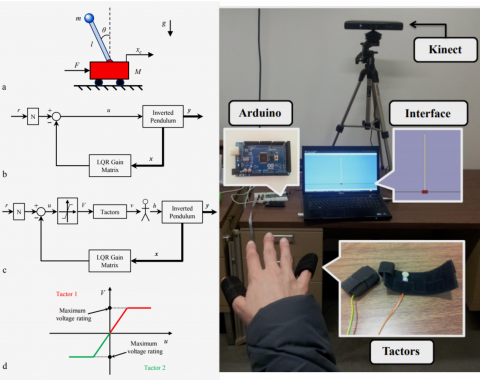 This project uses optimal control to provide synthetic sensory feedback to promote learning or re-learning of sensory motor skills. Specifically, we use vibrotactile feedback to encode an optimized linear combinations of state information, providing information about the optimal course of action. We have studied this in healthy subjects performing a balancing task as well as impaired subjects performing a tracking task. In both cases, task performance was enhanced by a combination of visual and tactile input.
This project uses optimal control to provide synthetic sensory feedback to promote learning or re-learning of sensory motor skills. Specifically, we use vibrotactile feedback to encode an optimized linear combinations of state information, providing information about the optimal course of action. We have studied this in healthy subjects performing a balancing task as well as impaired subjects performing a tracking task. In both cases, task performance was enhanced by a combination of visual and tactile input.
People:
Todd Murphey
Katie Fitzsimons
Ola Kalinowska
Related Publications
Ergodicity reveals assistance and learning from physical human-robot interaction, Science: Robotics, vol. 4, no. 29, 04/2019/ 2019
Data-Driven Gait Segmentation for Walking Assistance in a Lower-Limb Assistive Device, International Conference on Robotics and Automation (ICRA), 2019
Operation and Imitation under Safety-Aware Shared Control, Workshop on the Algorithmic Foundations of Robotics WAFR, 2018
Optimal Human-In-The-Loop Interfaces Based on Maxwells Demon, American Control Conference (ACC), Boston, MA, pp. 4397-4402, 07/2016/ 2016
Tactile Proprioceptive Input in Robotic Rehabilitation After Stroke, IEEE Int. Conf. on Robotics and Automation (ICRA), 2015
Controllers as Filters Noise-Driven Swing-Up Control Based on Maxwell s Demon, IEEE Conf. on Decision and Control (CDC), 2015
Effects of Optimal Tactile Feedback in Balancing Tasks a Pilot Study, American Control Conference (ACC), 2014
Back to top