
Whisker-Based Robots
About
Because of their poor eyesight, rats rely on their whiskers (also called vibrissae) to obtain three-dimensional tactile information about the surrounding world, including the shape and texture of nearby surfaces. This process is in many ways analogous to the manner by which humans use their fingertips to infer tactile information from nearby objects. Our lab aims to understand this process and to replicate it artificially by creating robotic whiskers.
These whisker-based robots may find use in several different applications—for example, in the field of pipeline inspection. Below, you can also read about how we design robotic whiskers, and about the sensing capabilities of our current robotic whisker systems. Equally important, these robots serve as critical investigative tools for neuroscience research.
Applications of robotic whiskers
Robotic whiskers have a number of potential uses, especially in situations where optical information is difficult to obtain. Conditions including fog, darkness, glare, and reflections can all prevent optical sensors from working optimally. One possible application is fault detection in piping, machinery, and ducts. The primary aim of fault detection is to diagnose and repair potential problems as early as possible to avoid any catastrophic or expensive failures. However, many of the current sensing modalities used for fault detection lack the required resolution. A tactile brush based on the rat whisker system has the potential to greatly improve this resolution, leading to earlier diagnosis.
Another potential application is in the field of intravascular surgery. This application would require our robotic whiskers to be miniaturized in a biocompatible manner. An increasing number of surgeries are being conducted non-invasively. Although there are several optical sensing methods available to the surgeon, none of these methods can replicate the sense of touch that is lost when performing non-invasive surgery.
Robotic whisker design
A rat’s whisker is similar to a stiff hair, and has no sensing capability along its length—all of the mechanoreceptors (sensors) that respond to deformation of the whisker are in the follicle at the whisker base. Even so, the rat can determine many properties of objects (e.g., shape, orientation, and texture) simply by whisking against the object.
We have built several arrays of “biomimetic” robotic whiskers. The arrays are designed to extract many of the same features that a rat might obtain through whisking. Each whisker in the array consists of a single wire (often superelastic Nitinol) set into an artificial “follicle.” The only sensors used by the robotic whiskers are strain gages mounted on the sides of the follicle, just as the only sensors a rat has are in its follicle. Examples of two of these arrays of whiskers can be seen in this video from Science Nation. The image below shows one of the arrays, and a closeup of the whisker design.

a) Robotic whisker array with five horizontally aligned whiskers b) One whisker, showing strain gage placement on one side of the follicle
Of course, the design of these robotic whiskers is strongly influenced by our studies of whisker mechanics. The manner in which the arrays are moved around the object are also influenced by our ongoing studies of rat whisking behavior.
Current robotic whisker systems
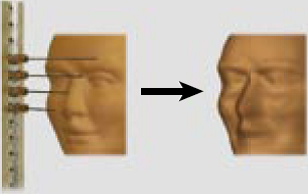
We have been successful at extracting key object features with our robotic whiskers. In one experiment, four robotic whiskers tapped across the face of a small statue, and we were able to recreate the contours of the face solely from the whisker information, as seen below.
Our robotic whiskers can also perform shape and contour extraction when continuously swept along an object. The following video shows the actual data gathered when a robotic whisker was swept along the contours of various shapes. The whisker in the video is simulated to show the location of the real whisker during data collection.
We’ve also shown that an array of whiskers can be used to predict the upcoming contour of an object (Schroeder and Hartmann, 2012). In other words, as a robot navigates along a surface, it can use information from its whiskers to predict the sensory information it will receive at the next time step. This prediction confers two advantages. First, it would allow the robot to initiate turns more quickly, if it knows the upcoming contour is about to turn. Second, it could provide the robot with a way to distinguish between externally-generated and self-generated motion. Because behaviors such as escape or predation must link motion detection to immediate motor action, a mismatch between predicted and actual sensory input may serve as a way of directing an animal’s attention.
Robotics as a tool in neuroscience research
Robots allow us to explore mechanical questions that would be very difficult to answer in the real animal. For example, we used a robot to show that a rat might be able to use the rate of change of bending moment (torque) at the vibrissa base to determine the distance to an object (Solomon and Hartmann, 2006). When experimenting with the robot, we discovered that one problem was that the whisker tended to “slip” in complicated ways along the object’s surface. Further investigation of this slip led us to propose that the rat would have to use combinations of at least two components of bending moment to extract the object’s features. As a direct consequence of these predictions, we are now performing neurophysiological experiments to quantify the responses of neurons to these types of mechanical signals.
People
Mitra Hartmann
Patrick Shanley
Chris Schroeder
Matthew Graff
Yan Man
Anne En-Tzu Yang
Related Publications
Contact-Resistive Sensing of Touch and Airflow Using A Rat Whisker, 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob)2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede: IEEE, pp. 1187 - 1192, 2018
Sensory prediction on a whiskered robot A tactile analogy to optic flow, Frontiers in Neurorobotics, vol. 6, Frontiers, pp. 9, 10/2012/ 2012
Sensing device with whisker elements, Google Patents, 2010
Extracting object contours with the sweep of a robotic whisker using torque information, The International Journal of Robotics Research, vol. 29, SAGE Publications, pp. 1233-1245, 2010
Sensing features with robotic whiskers, Nature, vol. 443, pp. 525, 2006
Back to top