
Dynamic and Nonprehensile Manipulation: Hybrid Manipulation Planning and Control
About
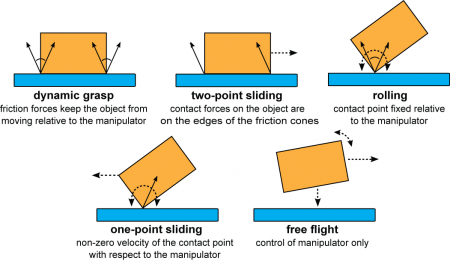 This work focuses on motion planning and control for robotic manipulation tasks in which the manipulator, object, and the environment transition between different contact modes. The dynamic equations that govern how the system evolves over time depend on manipulator controls, contact locations, and whether contacts are fixed/rolling or sliding. This is because the coupling of the manipulator controls to the object through the contacts, and the possible contact forces applied by the environment, are different. We define manipulation primitives according to the number and types of contacts the object makes with a robot and its (rigid) environment. We are currently working on methods to identify different contact primitives, plan between them, and stabilize motion plans using feedback control.
This work focuses on motion planning and control for robotic manipulation tasks in which the manipulator, object, and the environment transition between different contact modes. The dynamic equations that govern how the system evolves over time depend on manipulator controls, contact locations, and whether contacts are fixed/rolling or sliding. This is because the coupling of the manipulator controls to the object through the contacts, and the possible contact forces applied by the environment, are different. We define manipulation primitives according to the number and types of contacts the object makes with a robot and its (rigid) environment. We are currently working on methods to identify different contact primitives, plan between them, and stabilize motion plans using feedback control.
Our custom built experimental setup consists of a 3-DOF robot arm that moves in a plane parallel to the surface of an inclined air hockey table. Each link is actuated by a brushed DC motor with harmonic drive gearing and current controlled using Junus motor amplifiers. The 1000 Hz motion controller runs on a PC104 embedded computer running the QNX real-time operating system. Vision feedback is given by a 250 Hz IR Optitrack camera. Desired trajectories and experimental results are transmitted between the PC104 and a PC running MATLAB using a TCP/IP connection. A demonstration of the types of motions we are planning for is shown in the video below using a series of manually chosen motions. Future work will focus on automating the process of generating primitives, choosing mode sequences, planning within single modes, and stabilizing them.
Related Publications
Planning and Control for Dynamic, Nonprehensile, and Hybrid Manipulation Tasks, IEEE International Conference on Robotics and Automation, Singapore, 05/2017/ 2017
Recurrence, controllability, and stabilization of juggling, Robotics and Automation, IEEE Transactions on, vol. 17, IEEE, pp. 113-124, 2001
Control of underactuated manipulation by real-time nonlinear optimization, ROBOTICS RESEARCH, INTERNATIONAL SYMPOSIUM, vol. 9, pp. 51-58, 2000
Dynamic nonprehensile manipulation Controllability, planning, and experiments, The International Journal of Robotics Research, vol. 18, SAGE Publications, pp. 64, 1999
Back to top