
Dynamic and Nonprehensile Manipulation: Rolling Manipulation
About
Our long-term goal is to develop a unified framework for planning and control of dynamic robotic manipulation. A typical manipulation plan consists of a sequence of manipulation primitives chosen from a library of primitives, with each primitive equipped with its own feedback controller. Problems of interest include planning the motion of the manipulator to achieve the desired motion of the object and feedback control to stabilize the desired trajectory.

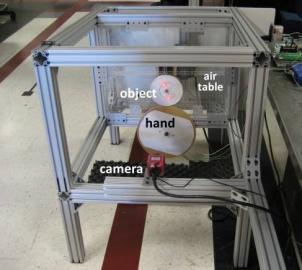
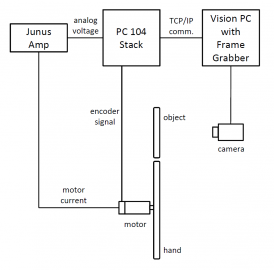
As a first step to understand the nature of dynamic nonprehensile manipulation, we study feedback stabilization of a canonical rolling problem: balancing a disk-shaped object on top of a disk-shaped manipulator (referred to as the hand) in a vertical plane. The balancing task is further extended to more difficult problems of stabilization at the upright position while the hand or object (i) rotates to a specific orientation or (ii) spins at a constant velocity. We constrain the motion of the circular hand to rotation about its center. We derive control laws that stabilize the object to the balanced position under the kinematic assumption of rolling at all times. The basin of attraction is reduced when the contact is modeled using Coulomb friction, but it is still large with large friction coefficients. This work is successfully implemented using high-speed vision feedback.
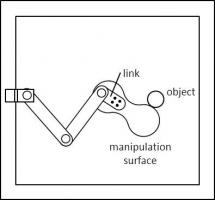 We are currently focusing on motion planning and feedback stabilization of a broad class of rolling trajectories for smooth planar objects rolling on smooth planar hands (other than disks) moving with a full three degrees-of-freedom. The resulting dynamic rolling manipulation primitive will be incorporated into our library of nonprehensile manipulation primitives.
We are currently focusing on motion planning and feedback stabilization of a broad class of rolling trajectories for smooth planar objects rolling on smooth planar hands (other than disks) moving with a full three degrees-of-freedom. The resulting dynamic rolling manipulation primitive will be incorporated into our library of nonprehensile manipulation primitives.
Funding
This work is supported by National Science Foundation grant IIS-0964665.
Video
Related Publications
Motion Planning and Feedback Control of Rolling Bodies, IEEE Access, no. Volume: 8, pp. 31780 - 31791, February/ 2020
Second-Order Contact Kinematics Between Three-Dimensional Rigid Bodies, Journal of Applied Mechanics, vol. 866371316, no. 84333, pp. 085501, 05-17-2019/ 2019
Control of nonprehensile rolling manipulation Balancing a disk on a disk, Robotics and Automation (ICRA), 2012 IEEE International Conference on, IEEE, pp. 3232-3237, 2012
Rolling manipulation with a single control, Control Applications, 2001.(CCA 01). Proceedings of the 2001 IEEE International Conference on, IEEE, pp. 1089-1094, 2001
Controllability of single input rolling manipulation, Robotics and Automation, 2000. Proceedings. ICRA 00. IEEE International Conference on, vol. 1, IEEE, pp. 354-360, 2000
The roles of shape and motion in dynamic manipulation The butterfly example, Robotics and Automation, 1998 IEEE International Conference on, vol. 3, IEEE, pp. 1958-1963, 1998
Back to top