
Functional Electric Stimulation
About
 Functional electrical stimulation (FES) systems can restore various functions to persons with impairments such as spinal cord injury, brain injury, and stroke. FES can be used to control skeletal movements in cycling, walking, grasping, and reaching. Our research focuses on using FES to restore reaching motions to persons with high spinal cord injuries who have little or no voluntary control over their upper extremities.
Functional electrical stimulation (FES) systems can restore various functions to persons with impairments such as spinal cord injury, brain injury, and stroke. FES can be used to control skeletal movements in cycling, walking, grasping, and reaching. Our research focuses on using FES to restore reaching motions to persons with high spinal cord injuries who have little or no voluntary control over their upper extremities.
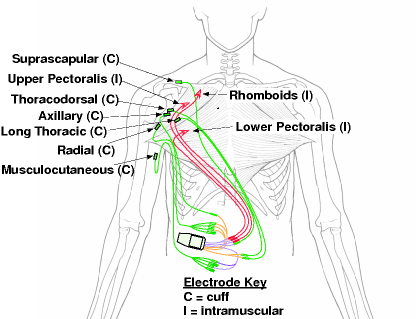
We work in close collaboration with Case Western Reserve University and the Cleveland FES Center. Our colleagues have developed an implantable upper extremity neuroprosthesis for people with tetraplegia. This system can stimulate multiple nerves and muscles to evoke movements of the shoulder, elbow, wrist, and fingers. Electrical stimulation to the muscles can be controlled externally by a computer via a transcutaneus RF link.
The video on top shows a person with a high spinal cord injury who's arm is controlled by an implanted neuroprosthesis. With the aid of computer simulation and trial and error a stimulation pattern was chosen to produced the arm trajectory in the video. This tuned stimulation pattern for a single stereotyped motion is representative of the current state of FES systems. Our goal is flexible control of the FES system where any achievable trajectory can be requested and a controller automatically determines the muscle stimulation inputs to achieve that trajectory. To reach the goal of flexible control of FES for reaching movements our research focuses on two areas:
- Identifying subject-specific input-output models for feedforward control
- Determining the stability of feedforward stimulation patterns
Efficient System Identification for Feedforward Control
One focus of our work is on efficiently identifying input/output models for use for feedforward controllers of FES systems. The inputs to the FES system are the stimulation pulse widths for the nerves and muscles being stimulated. The outputs are forces or motions of the paralyzed arm. We do experiments with a human subject to determine how the specific FES system responds to its inputs and use the experimental data to build models mapping inputs to outputs. The models can be inverted and used in feedforward control.

While feedback is critical for controlling precise reaching movements, feedforward control is necessary for two main reasons. The first is that feedforward control in conjunction with feedback control uses less muscle energy than feedback control alone. FES of the peripheral nervous system fatigues muscles faster than stimulation initiated by the central nervous system of persons without spinal cord injury, so limiting the amount of stimulation to a muscle is critical to prevent fatigue. The second is that feedback is applied at a relatively low frequency (~12 hz) which does not allow for a quick response.
Efficient system identification is important for several reasons. The space of stimulation inputs and states of the arm is rather large. We have 12 inputs at our disposal to control at least five degrees of freedom in the shoulder and elbow. Exhaustive search of the input and state space is not feasible as human subjects have limited energy before muscle fatigue sets in, and laboratory time with a human subject is limited to a few hours. Potential users of FES systems are not likely to adopt a system that requires a long time to calibrate before functional use. Muscle dynamics are time varying due to strengthening, weakening, fatigue, and various changes in stiffness due to spasms, so a system model must be updated online or updated frequently offline.
We are applying techniques from optimal experiment design and statistical learning to quickly identify subject specific models that can immediately be used for feedforward control.
Quantification of the Stability of Feedforward FES Control
When we control the muskuloskeletal system with FES, the outcoming stability is of critical importance. In many robotics and control applications, the system stability can be enhanced by applying appropriate feedback control. However in FES, due to the low control-rate (12~16Hz) and the presence of significant time-delay in the neuromuscular system, stabilization through feedback control remains a challenge. As a first step, we seek to quantify the stability of the system associated with feedforward FES control.
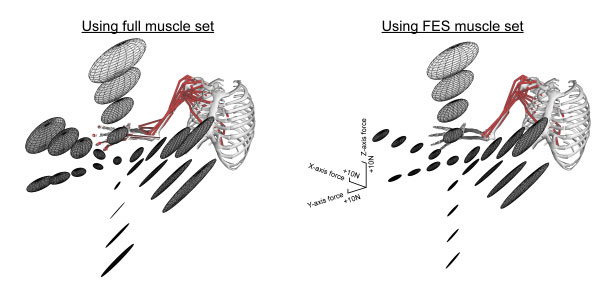
We apply a biomechanical model to predict the muscle short-range-stiffness as the muscles are activated via electrical stimulation. We then transform the muscle stiffness to joint-level and, eventually, endpoint-level. We can use the predicted stiffness as a proxy to dictate the stability of the whole muskuloskeletal system at static arm configurations or in quasi-static movement. It has been shown in previous studies that the predicted stiffness agrees well with data gathered in human experiments. We are now working on adjusting and utilizing the biomechanical model to predict the stiffness, and thus quantifying the stability, in feedforward FES control at various arm configurations.
People
Kevin M. Lynch
Yu-Wei Liao
Eric Schearer
Related Publications
Multi-Muscle FES Control of the Human Arm for Interaction Tasks-Stabilizing with Muscle Co-Contraction and Postural Adjustment A Simulation Study, 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), 2014
Multi-Muscle FES Force Control of the Human Arm for Arbitrary Goals, IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 22, no. 3, pp. 1-10, 05/2014/ 2014
Identifying Inverse Human Arm Dynamics Using a Robotic Testbed, 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), 2014
Modeling Open-Loop Stability of a Human Arm Driven by a Functional Electrical Stimulation Neuroprosthesis, 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), 2013
System identification for 3D force control of a human arm neuroprosthesis using functional electrical stimulation, Robotics and Automation (ICRA), 2012 IEEE International Conference on, IEEE, pp. 3698-3705, 2012
Optimal Sampling of Recruitment Curves for Functional Electrical Stimulation Control, 34th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2012
Optimal Sampling for Identifying Models for FES Control of Neuroprostheses, International Functional Electrical Stimulation Conference, 2012
Back to top